Checkers Robot
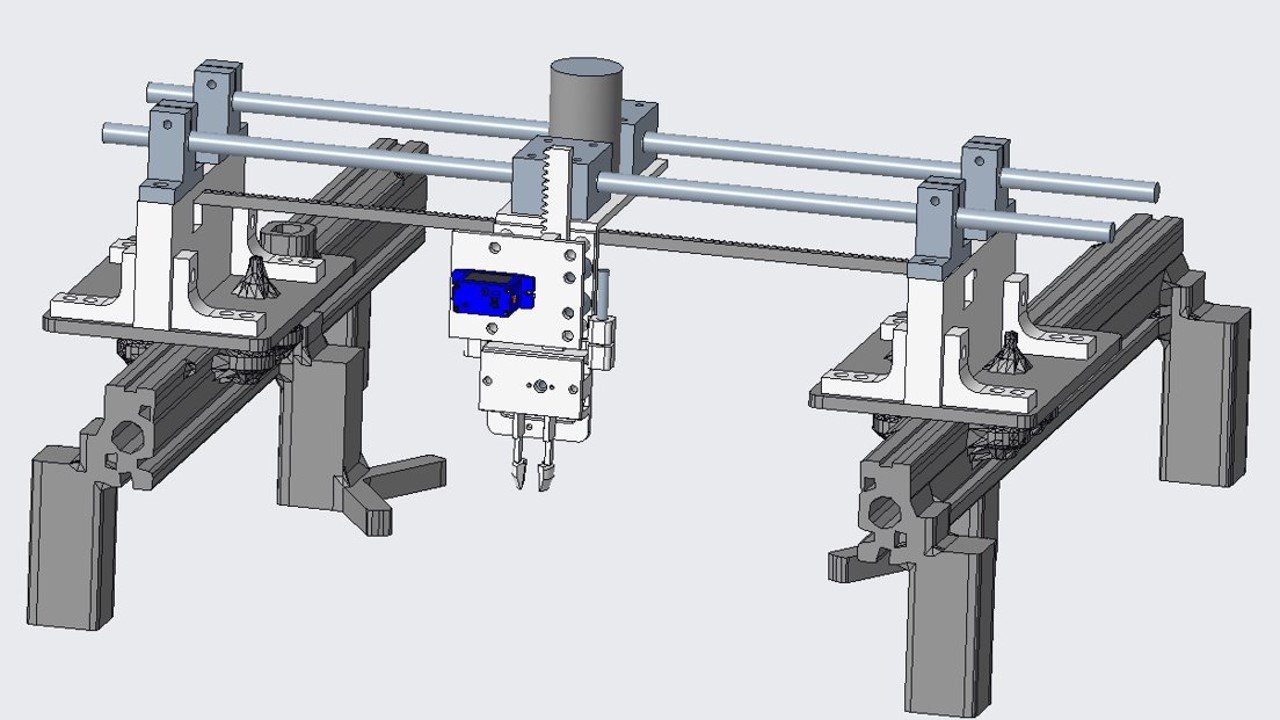
Now this project was quite fun. For the Mechatronics and Smart Device Design course our final project was to build a robot that would hold a Chinese Checkers board, detect the locations of game pieces, then move them to designated locations on the board. It was a competition between teams where we were scored on speed and accuracy. Our design used a set of limit switches to calibrate the gantry and to detect empty spaces. My partner designed the lower rail system, while I tackled the upper rail system and the claw mechanism. I got to learn a lot about gear design because I 3D printed the custom rack and pinon mechanisms, and I learned how to program an Arduino! In the end we didn’t quite win the competition, but we did have one of the fastest bots in the room.

